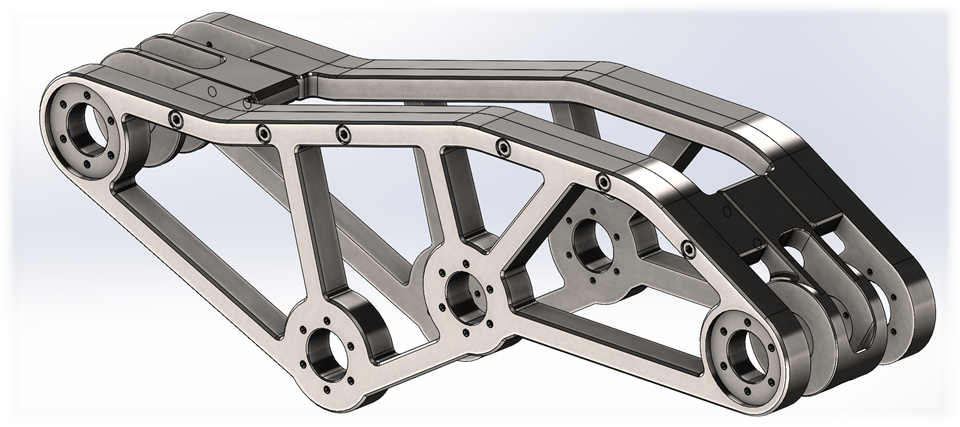
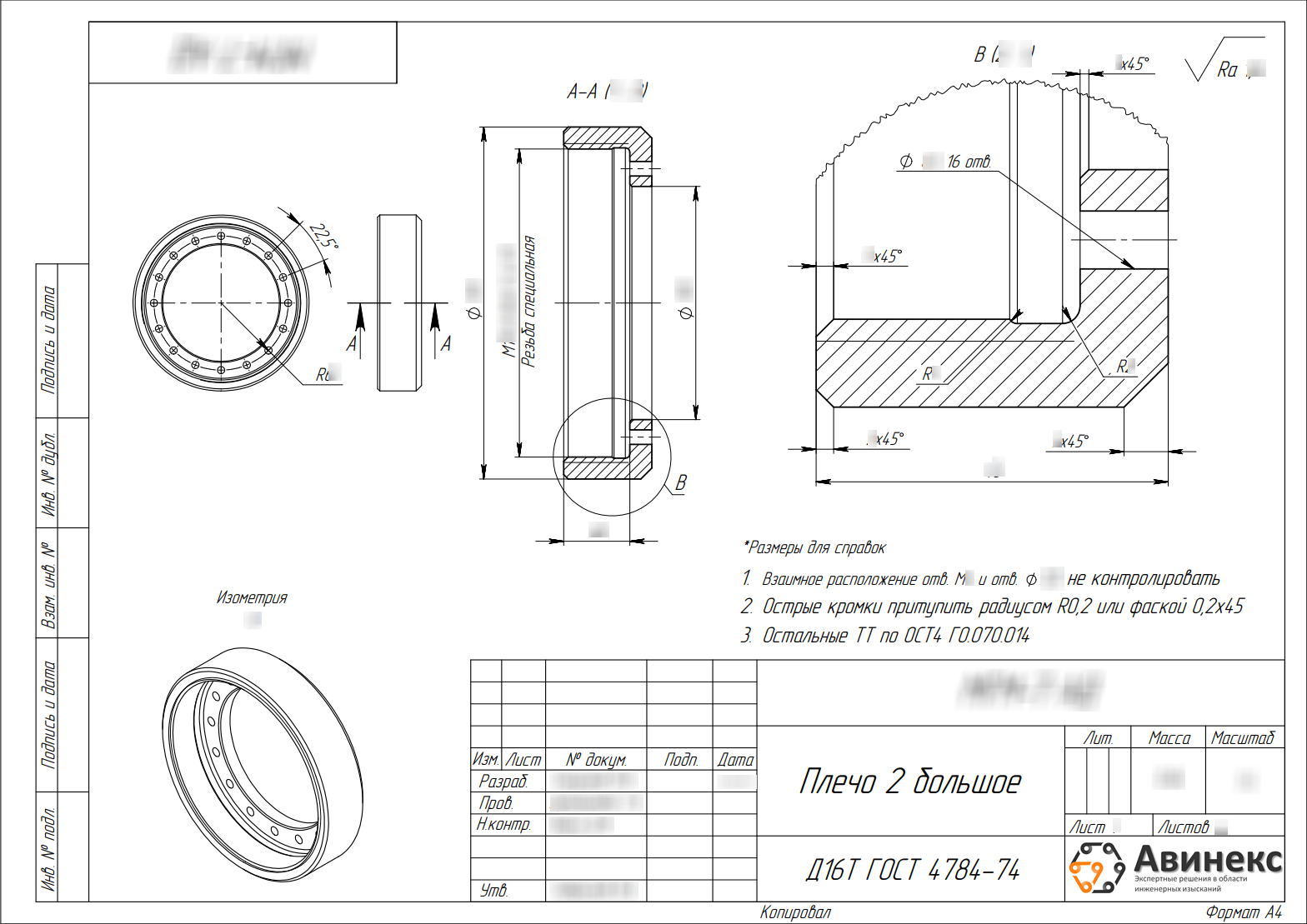
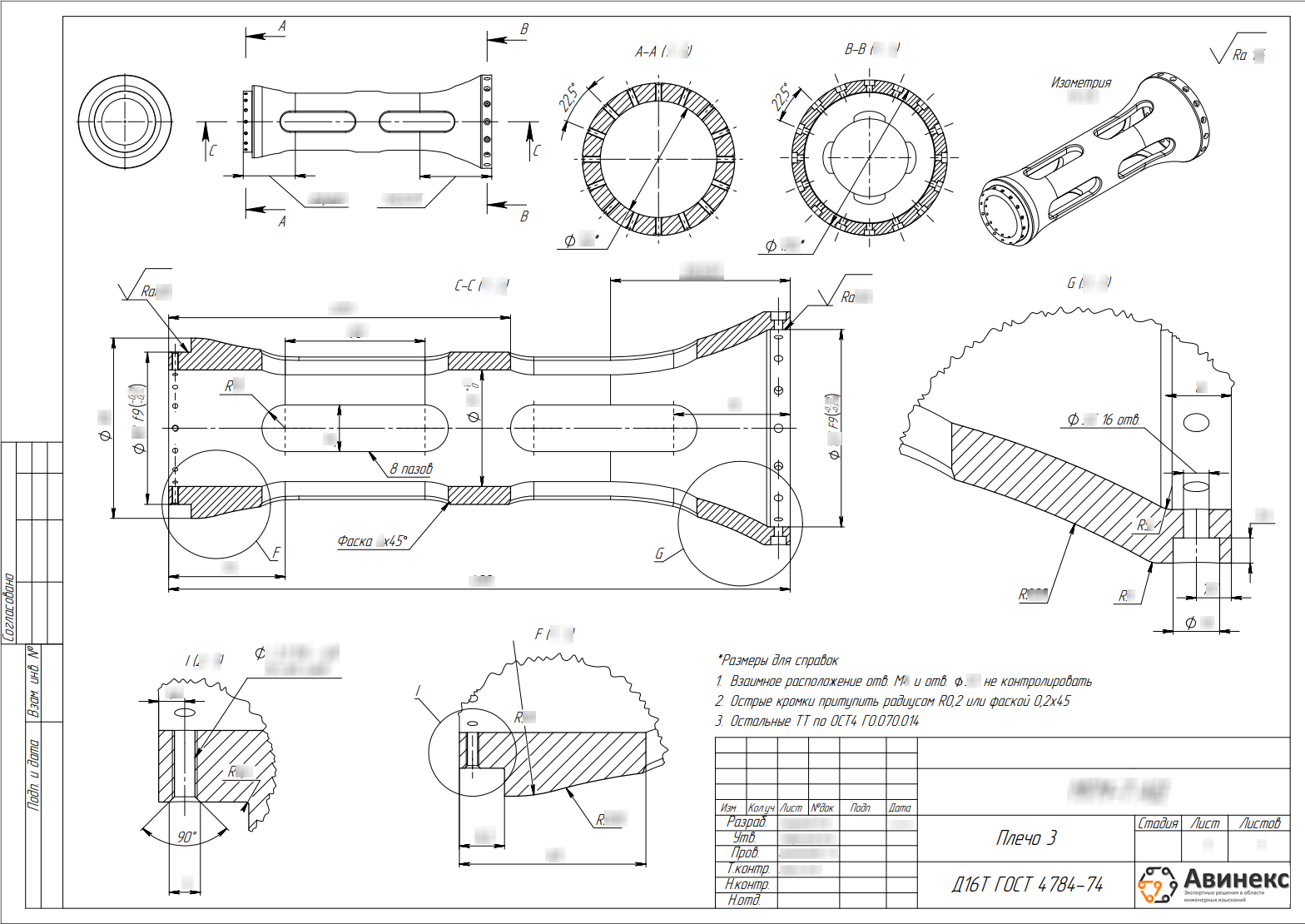
Разработка и создание робота-манипулятора
Инженеры «Авинекс» разработали и изготовили 7-осевой электрический робот-манипулятор из алюминиевого сплава Д16Т на базе волновых редукторов. Проект включал полный цикл: 3D-проектирование, расчёт прочности и топологическую оптимизацию, анализ грузоподъёмности, выпуск КД на изготовление и проведение технологического контроля. Выполнен подбор и расчёт приводов, определены рабочие зоны досягаемости, проведён поиск поставщиков оборудования. Проект реализован за 3 месяца с нуля и представлен на выставке НЕВА-2023. Область применения: сварка, складирование, сортировка и другие технологические операции



Копирующая система управления 7-осевым манипулятором
Разработали копирующую систему управления роботом-манипулятором (7 степеней свободы) на базе полунатурной модели из фотополимера и PLA-пластика. Решена обратная задача кинематики — как аналитически «на бумаге», так и в программной среде Motion Analysis. Для обеспечения плавности и стабильности работы реализованы фильтр Калмана и ПИД-регулирование актуаторов. Система успешно отработала в испытаниях и может быть масштабирована для промышленных манипуляторов, обеспечивая интуитивное и точное управление в реальном времени



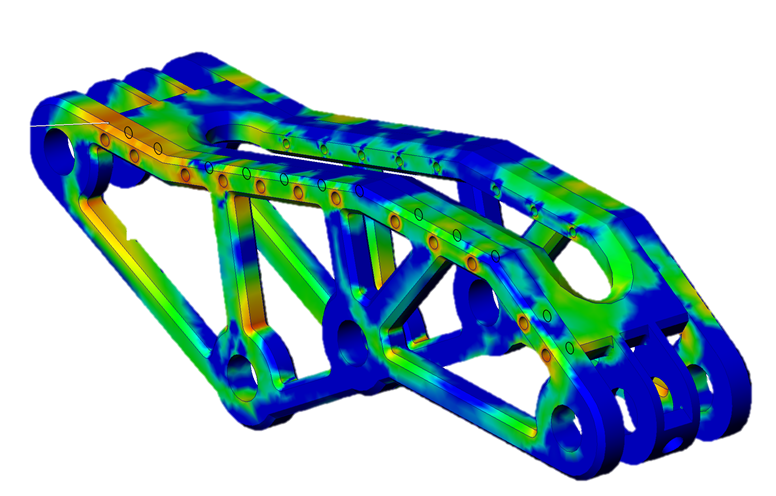
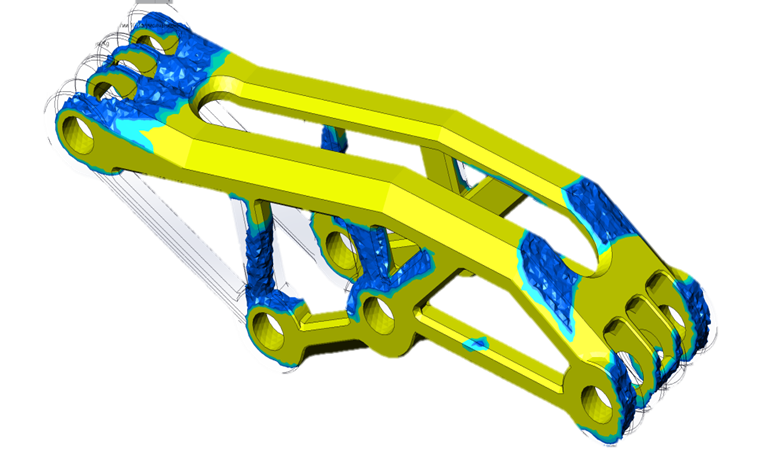
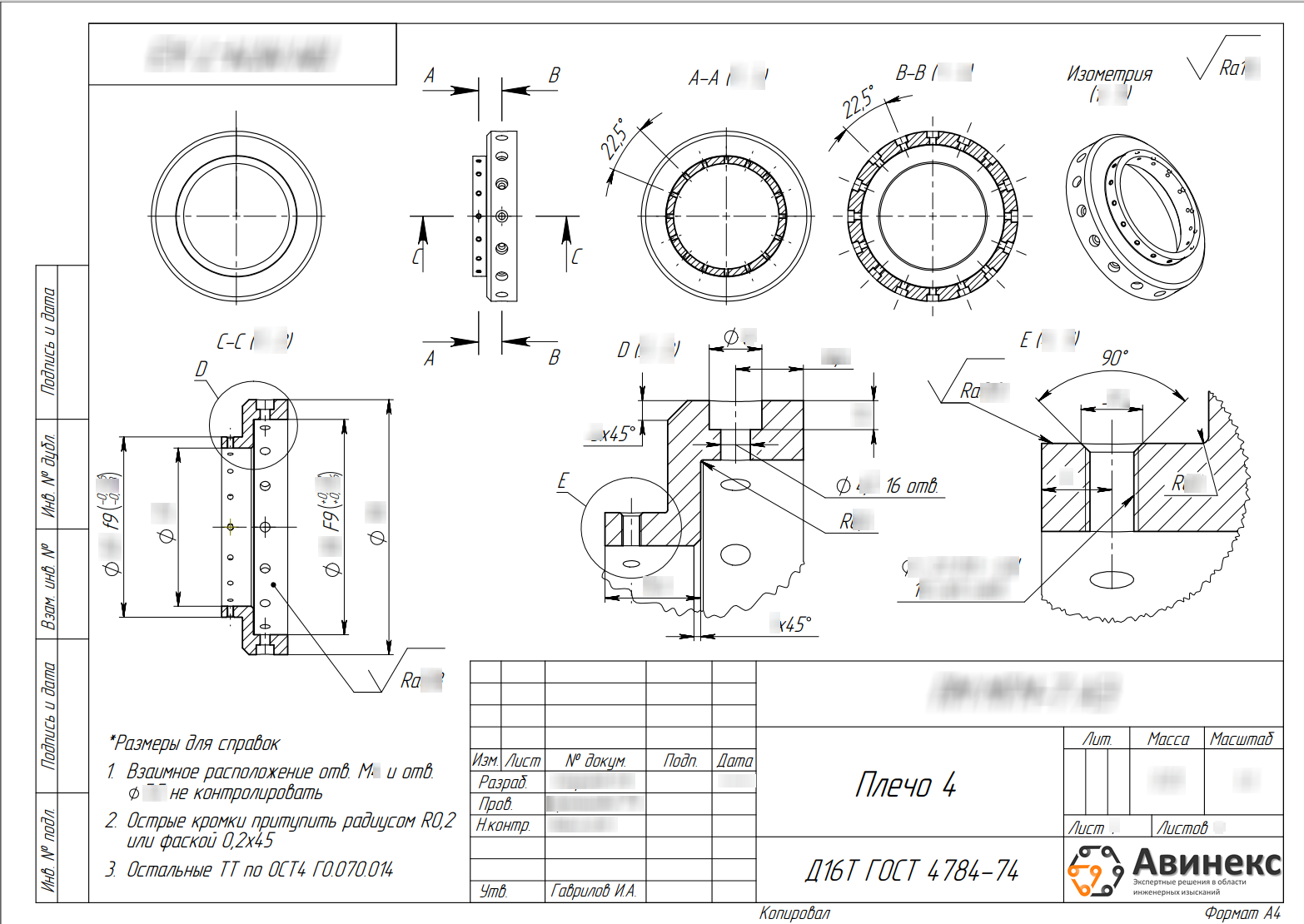
Топологическая оптимизация суставов робота
Инженеры «Авинекс» выполнили топологическую оптимизацию суставных элементов робота для снижения массы без потери прочности. В результате удалось достичь уменьшения массы более чем на 23%, сохранив при этом все расчётные характеристики. Подготовлен полный комплект конструкторской документации на изготовление, а изготовленный образец успешно прошёл натурные испытания, подтвердив полное совпадение с расчётными данными